
About
Hi there! I am Litian Gong (龚利天), a Master's student in Electrical Engineering at University of California - Riverside. I am currently a member of TASL under the supervision of Prof. Jiachen Li. I am also a student research intern at the Learning and Interactive Robot Autonomy Lab at USC, working with Prof. Erdem Bıyık. Before that, I obtained my bachelor's degree at Huazhong University of Science and Technology under the supervision of Prof. Shaorong Wang.
My research interest lies in robotic learning systems that fuse imitation learning, reinforcement learning, and VLMs to enable multimodal reasoning, long-horizon skills, sim-to-real transfer, and trustworthy, data-efficient autonomy.
Selected Publications
View All →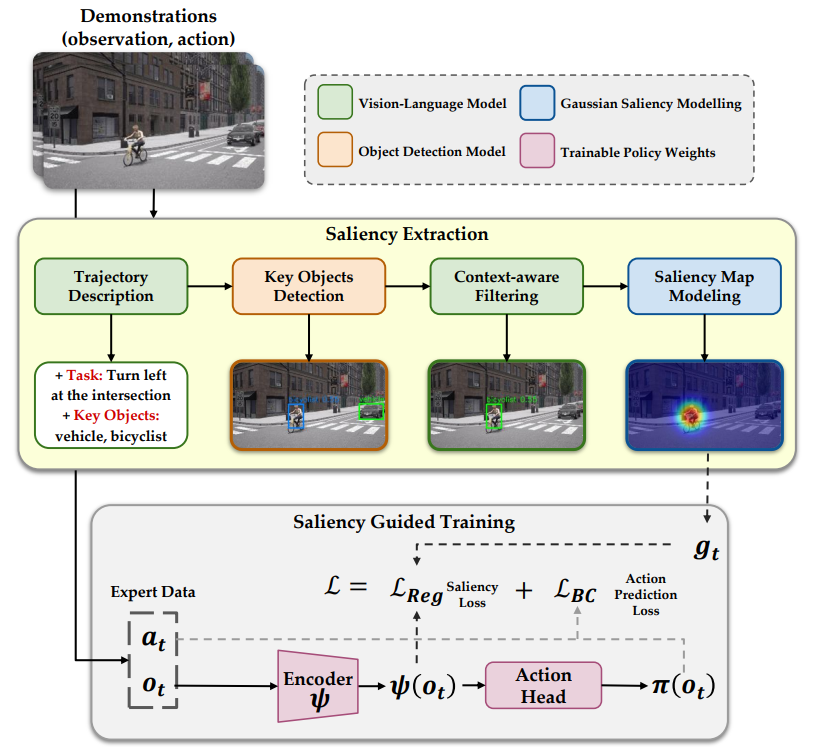
AutoFocus-IL: VLM-based Saliency Maps for Data-Efficient Visual Imitation Learning without Extra Human Annotations
Litian Gong, Fatemeh Bahrani, Yutai Zhou, Amin Banayeeanzade, Jiachen Li, Erdem Bıyık
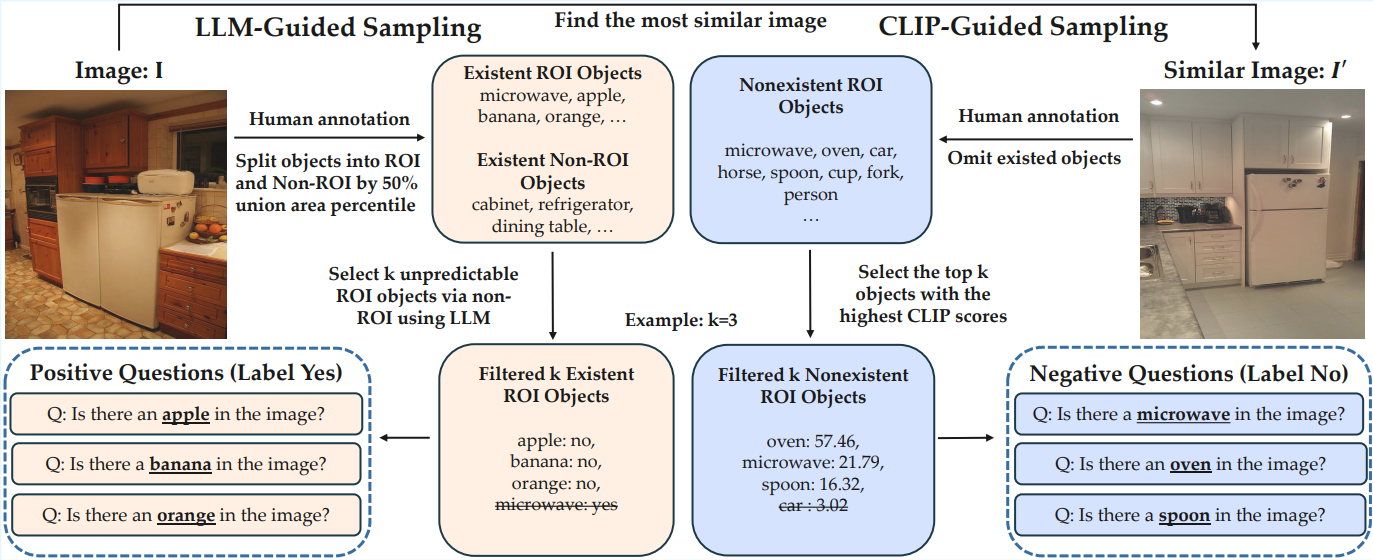
ORIC: Benchmarking Object Recognition under Contextual Incongruity in Large Vision-Language Models
Zhaoyang Li*, Zhan Ling*, Yuchen Zhou, Litian Gong, Erdem Bıyık, Hao Su
News
One paper accepted to CVPR 2026: ORIC: Benchmarking Object Recognition under Contextual Incongruity in Large Vision-Language Models
One paper accepted to ICRA 2026: AutoFocus-IL: VLM-based Saliency Maps for Data-Efficient Visual Imitation Learning without Extra Human Annotations
Joined the Learning and Interactive Robot Autonomy Lab at USC, working with Prof. Erdem Bıyık
Started research at Trustworthy Autonomous Systems Lab, UC Riverside, working with Prof. Jiachen Li
Started Master's program in Electrical Engineering at UC Riverside
Graduated from HUST as Outstanding Undergraduate Graduate
Awards
Outstanding Undergraduate Graduate
2024Huazhong University of Science and Technology
Recognized for outstanding academic performance and research contributions.
Honorable Prize
2023Mathematical Contest In Modeling
Achieved honorable mention in the international mathematical modeling competition.
Second Prize
2022China Undergraduate Mathematical Contest in Modeling
Won second prize in the national mathematical modeling competition.
Services
Conference Reviewer
2025 - presentIEEE International Conference on Robotics and Automation (ICRA)
Reviewing papers for ICRA, focusing on robot learning, imitation learning, and embodied AI.
Conference Reviewer
2025 - presentIEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)
Reviewing papers for CVPR, focusing on vision-language models and computer vision applications in robotics.